
Check what is underneath the clouds with sentinel 1
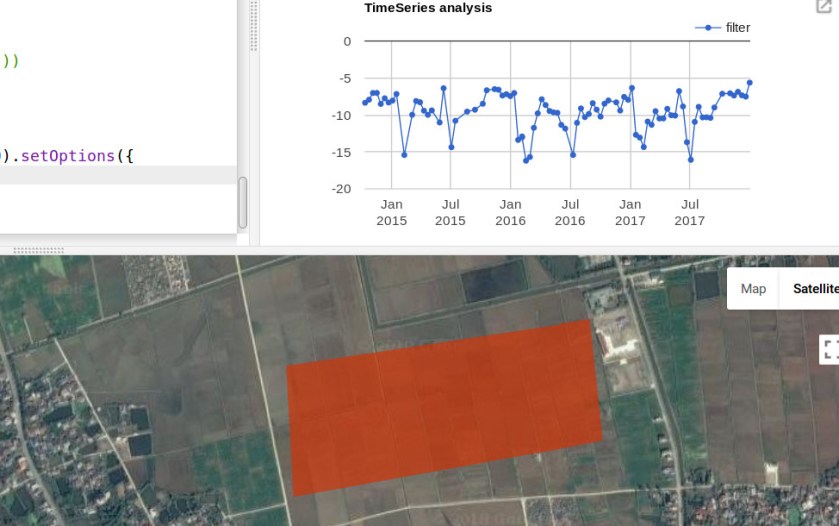
With sentinel 1 we can measure the earth where it’s cloudy or dark. Sentinel 1 uses synthetic aperture radar (SAR), a technology that can capture images in any light or weather condition. below an example to create timeseries with SAR using a speckle filter. See the example here.
// import sentinel 1 and filter data series
var S1 = ee.ImageCollection('COPERNICUS/S1_GRD')
.filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VH'))
.filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV'))
.filter(ee.Filter.eq('instrumentMode', 'IW'))
.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING'))
.filterBounds(roi)
.filterDate('2014-01-01','2017-12-31')
.select(["VV","VH"])
//Function to convert from dB
function toNatural(img) {
return ee.Image(10.0).pow(img.select(0).divide(10.0));
}
//Function to convert to dB
function toDB(img) {
return ee.Image(img).log10().multiply(10.0);
}
//Apllying a Refined Lee Speckle filter as coded in the SNAP 3.0 S1TBX:
//https://github.com/senbox-org/s1tbx/blob/master/s1tbx-op-sar-processing/src/main/java/org/esa/s1tbx/sar/gpf/filtering/SpeckleFilters/RefinedLee.java
//Adapted by Guido Lemoine
function RefinedLee(img) {
// img must be in natural units, i.e. not in dB!
// Set up 3x3 kernels
// convert to natural.. do not apply function on dB!
var myimg = toNatural(img);
var weights3 = ee.List.repeat(ee.List.repeat(1,3),3);
var kernel3 = ee.Kernel.fixed(3,3, weights3, 1, 1, false);
var mean3 = myimg.reduceNeighborhood(ee.Reducer.mean(), kernel3);
var variance3 = myimg.reduceNeighborhood(ee.Reducer.variance(), kernel3);
// Use a sample of the 3x3 windows inside a 7x7 windows to determine gradients and directions
var sample_weights = ee.List([[0,0,0,0,0,0,0], [0,1,0,1,0,1,0],[0,0,0,0,0,0,0], [0,1,0,1,0,1,0], [0,0,0,0,0,0,0], [0,1,0,1,0,1,0],[0,0,0,0,0,0,0]]);
var sample_kernel = ee.Kernel.fixed(7,7, sample_weights, 3,3, false);
// Calculate mean and variance for the sampled windows and store as 9 bands
var sample_mean = mean3.neighborhoodToBands(sample_kernel);
var sample_var = variance3.neighborhoodToBands(sample_kernel);
// Determine the 4 gradients for the sampled windows
var gradients = sample_mean.select(1).subtract(sample_mean.select(7)).abs();
gradients = gradients.addBands(sample_mean.select(6).subtract(sample_mean.select(2)).abs());
gradients = gradients.addBands(sample_mean.select(3).subtract(sample_mean.select(5)).abs());
gradients = gradients.addBands(sample_mean.select(0).subtract(sample_mean.select(8)).abs());
// And find the maximum gradient amongst gradient bands
var max_gradient = gradients.reduce(ee.Reducer.max());
// Create a mask for band pixels that are the maximum gradient
var gradmask = gradients.eq(max_gradient);
// duplicate gradmask bands: each gradient represents 2 directions
gradmask = gradmask.addBands(gradmask);
// Determine the 8 directions
var directions = sample_mean.select(1).subtract(sample_mean.select(4)).gt(sample_mean.select(4).subtract(sample_mean.select(7))).multiply(1);
directions = directions.addBands(sample_mean.select(6).subtract(sample_mean.select(4)).gt(sample_mean.select(4).subtract(sample_mean.select(2))).multiply(2));
directions = directions.addBands(sample_mean.select(3).subtract(sample_mean.select(4)).gt(sample_mean.select(4).subtract(sample_mean.select(5))).multiply(3));
directions = directions.addBands(sample_mean.select(0).subtract(sample_mean.select(4)).gt(sample_mean.select(4).subtract(sample_mean.select(8))).multiply(4));
// The next 4 are the not() of the previous 4
directions = directions.addBands(directions.select(0).not().multiply(5));
directions = directions.addBands(directions.select(1).not().multiply(6));
directions = directions.addBands(directions.select(2).not().multiply(7));
directions = directions.addBands(directions.select(3).not().multiply(8));
// Mask all values that are not 1-8
directions = directions.updateMask(gradmask);
// "collapse" the stack into a singe band image (due to masking, each pixel has just one value (1-8) in it's directional band, and is otherwise masked)
directions = directions.reduce(ee.Reducer.sum());
var sample_stats = sample_var.divide(sample_mean.multiply(sample_mean));
// Calculate localNoiseVariance
var sigmaV = sample_stats.toArray().arraySort().arraySlice(0,0,5).arrayReduce(ee.Reducer.mean(), [0]);
// Set up the 7*7 kernels for directional statistics
var rect_weights = ee.List.repeat(ee.List.repeat(0,7),3).cat(ee.List.repeat(ee.List.repeat(1,7),4));
var diag_weights = ee.List([[1,0,0,0,0,0,0], [1,1,0,0,0,0,0], [1,1,1,0,0,0,0],
[1,1,1,1,0,0,0], [1,1,1,1,1,0,0], [1,1,1,1,1,1,0], [1,1,1,1,1,1,1]]);
var rect_kernel = ee.Kernel.fixed(7,7, rect_weights, 3, 3, false);
var diag_kernel = ee.Kernel.fixed(7,7, diag_weights, 3, 3, false);
// Create stacks for mean and variance using the original kernels. Mask with relevant direction.
var dir_mean = myimg.reduceNeighborhood(ee.Reducer.mean(), rect_kernel).updateMask(directions.eq(1));
var dir_var = myimg.reduceNeighborhood(ee.Reducer.variance(), rect_kernel).updateMask(directions.eq(1));
dir_mean = dir_mean.addBands(myimg.reduceNeighborhood(ee.Reducer.mean(), diag_kernel).updateMask(directions.eq(2)));
dir_var = dir_var.addBands(myimg.reduceNeighborhood(ee.Reducer.variance(), diag_kernel).updateMask(directions.eq(2)));
// and add the bands for rotated kernels
for (var i=1; i<4; i++) {
dir_mean = dir_mean.addBands(myimg.reduceNeighborhood(ee.Reducer.mean(), rect_kernel.rotate(i)).updateMask(directions.eq(2*i+1)));
dir_var = dir_var.addBands(myimg.reduceNeighborhood(ee.Reducer.variance(), rect_kernel.rotate(i)).updateMask(directions.eq(2*i+1)));
dir_mean = dir_mean.addBands(myimg.reduceNeighborhood(ee.Reducer.mean(), diag_kernel.rotate(i)).updateMask(directions.eq(2*i+2)));
dir_var = dir_var.addBands(myimg.reduceNeighborhood(ee.Reducer.variance(), diag_kernel.rotate(i)).updateMask(directions.eq(2*i+2)));
}
// "collapse" the stack into a single band image (due to masking, each pixel has just one value in it's directional band, and is otherwise masked)
dir_mean = dir_mean.reduce(ee.Reducer.sum());
dir_var = dir_var.reduce(ee.Reducer.sum());
// A finally generate the filtered value
var varX = dir_var.subtract(dir_mean.multiply(dir_mean).multiply(sigmaV)).divide(sigmaV.add(1.0));
var b = varX.divide(dir_var);
var result = dir_mean.add(b.multiply(myimg.subtract(dir_mean)));
//return(result);
return(img.addBands(ee.Image(toDB(result.arrayGet(0))).rename("filter")));
}
var collection = S1.map(RefinedLee);
var col = ee.ImageCollection(collection.select("filter"));
print(ui.Chart.image.series(col, roi, ee.Reducer.mean(), 20).setOptions({
title: 'TimeSeries analysis',
lineWidth: 1,
pointSize: 3 }));

can you please explain what it really does. doe it measures the change in the surface in time series
LikeLike
Can u explain what it does. Does it measure change in surface during the timeseries
LikeLike
Hi,
what’s the variable ‘filter’ used for the chart? which polarisation does it comes from?
LikeLike
how is ‘filter’ calculated?
LikeLike
it is the output from the RefinedLee function
LikeLike
when I run this speckle filter in google colab the following error has occurred.
directions = directions.addBands(directions.select(0).not().multiply(5));
File “”, line 39
directions = directions.addBands(directions.select(0).not().multiply(5));
^
SyntaxError: invalid syntax
LikeLike
check you .not function
LikeLike